


Self-Driving Car Studio
The Quanser Self-Driving Car Studio is the ideal platform to investigate a wide variety of research topics for teaching and academic research in an accessible and relevant way. Use it to jump-start your research or give students authentic hands-on experiences learning about the essentials of self-driving. The studio brings you the tools and components you need to test and validate dataset generation, mapping, navigation, machine learning, and other advanced self-driving concepts at home or on campus.
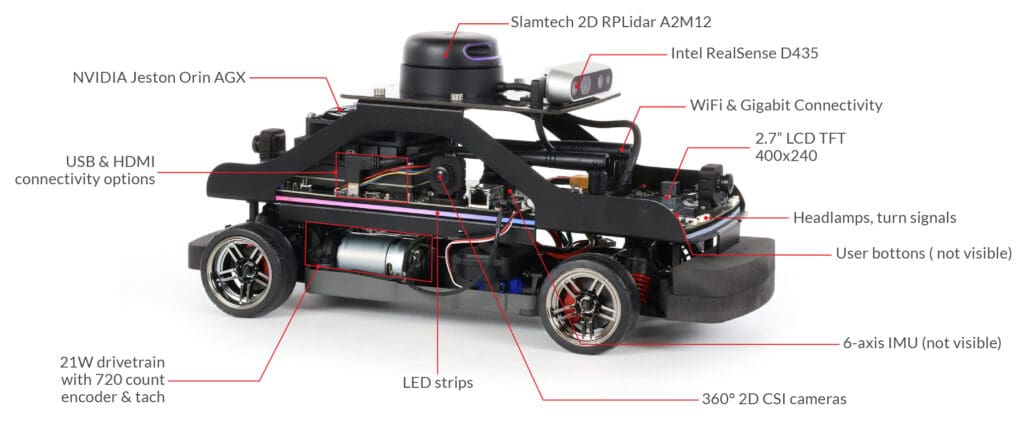
At the center of the Self-Driving Car Research Studio, the QCar 2, is an open-architecture scaled model vehicle, powered with NVIDIA® Jetson™ Orin AGX supercomputer, and equipped with a wide range of sensors, cameras, encoders, and user-expandable IO.
Relying on a set of software tools including Simulink®, Python™, TensorFlow, and ROS, the studio enables researchers to build high-level applications and reconfigure low-level processes that are supported by pre-built modules and libraries. Using these building blocks, you can explore topics such as machine learning and artificial intelligence training, augmented/mixed reality, smart transportation, multi-vehicle scenarios and traffic management, cooperative autonomy, navigation, mapping and control, and more.
| Product Details | |
| Dimensions | 39 x 21 x 21 cm |
| Weight (with batteries) | 2.7 kg |
| Operation time | 2 hr 11 m (stationary, with sensors feedback) |
| Power | 3S 11.1V LiPo (3300 mAh) with XT60 connectorr |
| Onboard computer | NVIDIA Jetson Orin AGX |
| CPU- 2.2 GHz 8-core ARM Cortex-A78 64-bit | |
| GPU- 930 MHz 1792-CUDA/56-TENSOR cores | |
| NVIDIA Ampere GPU architecture 200 TOPS | |
| Memory- 32GB 256-bit LPDDR5 @ 204.8 GB/s | |
| LIDAR | LIDAR with 16k points, 5-15 Hz scan rate, 0.2-12m range |
| Cameras | Intel D435 RGBD Camera |
| 360° 2D CSI Cameras using 4x 160° FOV wide angle lenses, 21fps to 120fps | |
| Encoders | 720 count motor encoder pre-gearing with hardware digital tachometer |
| IMU | 6-axis IMU (gyroscope & accelerometer) |
| Safety features | Hardware “safe” shutdown button |
| Auto-power off to protect batteries | |
| Expandable IO | • 2 user PWM output channels |
| • Motor throttle control | |
| • Steering control | |
| • 2 unipolar user analog input channels, 12-bit, +3.3V | |
| • motor current analog inputs | |
| • 3 encoder channels (motor position plus up to two additional encoders) | |
| • 11 reconfigurable digital I/O | |
| • 3 user buttons | |
| • 2 general purpose 3.3V high-speed serial ports* | |
| • 1 high-speed 3.3V SPI port (up to 25 MHz)* | |
| • 1 1.8V I2C port (up to 1 MHz)* | |
| • 1 3.3V I2C port (up to 1 MHz)* | |
| • 2 CAN bus interfaces (supporting CAN FD) | |
| • 1 USB port | |
| • 1 USB-C host port | |
| • 1 USB-C DRP | |
| Connectivity | Wi-Fi 802.11a/b/g/n/ac 867 Mbps with dual antennas |
| 1x HDMI | |
| 1x 10/100/1000 BASE-T Ethernet | |
| Additional QCar feautres | Headlamps, brake lights, turn signals and reverse lights |
| Individually programmable RGB LED strip (33x LEDs) | |
| Dual microphones | |
| Speaker | |
| 2.7″ LCD TFT 400×240 for diagnostic monitoring | |
Vehicles
• QCar 2*
• QCar*
• (single vehicle or fleet)
Ground Control Station
• High-performance computer with RTX graphics card with Tensor AI cores
• Three monitors
• High-performance router
• Wireless gamepad
• QUARC Autonomous license
Studio Space
• Driving map featuring intersections, parking spaces, single & double lane roads and roundabouts
• Supporting infrastructure including traffic lights, signs and cones














