



Qube-Servo 3
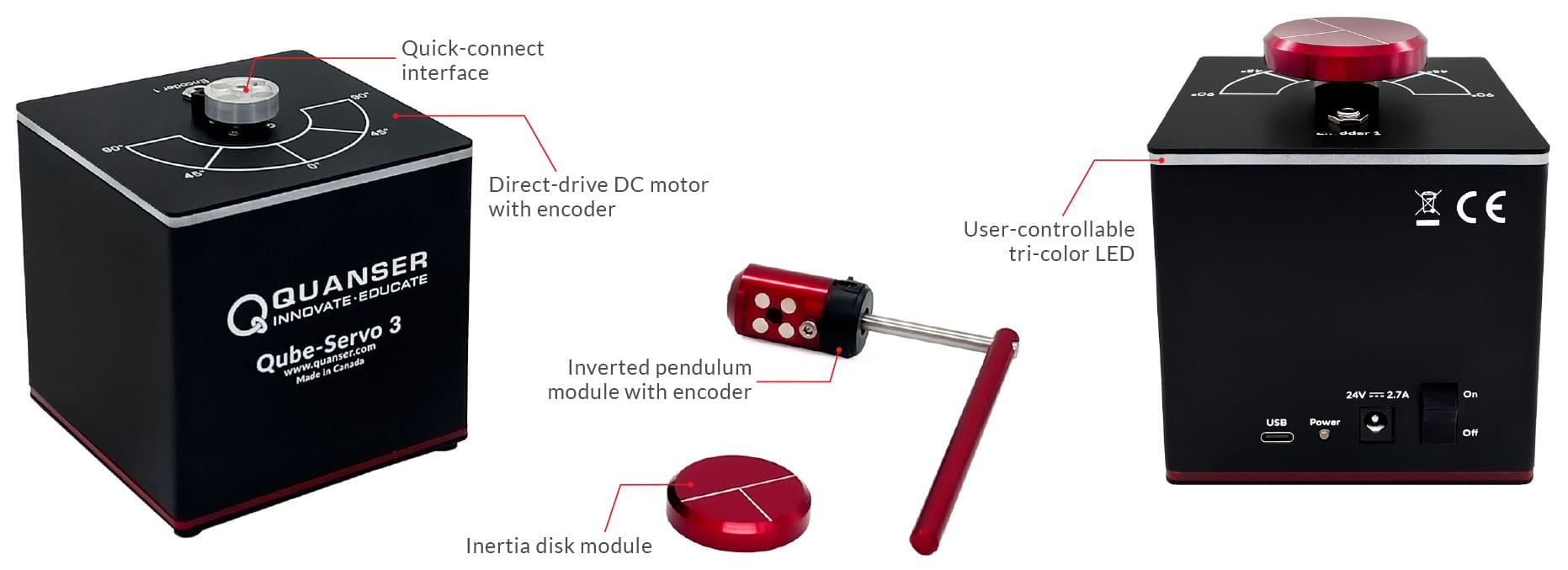
The Qube Servo 3 is the fastest and most efficient way to bring modern, hands-on learning experiences into your Control Systems course. The system is equipped with a high-quality direct-drive brushed DC motor, two encoders, an internal data acquisition system, and an amplifier. Connect with USB to a Windows PC using MATLAB Simulink or Python.
Qube-Servo 3 comes with a quick-connect inertia disk and an inverted pendulum module. You can also design and 3D print your own module to expand the scope of the experiment or create an engaging student project. Take advantage of the comprehensive ABET-aligned course material for MATLAB® Simulink®, or design and validate your own controllers. With additional language support in Python and C/C++, new features include the ability to disable deadband compensation to directly model and control the DC motor.
• Safe: Built-in motor stall and thermal protection
• Comprehensive Courseware: ABET-aligned courseware mapped to popular control engineering textbooks
• Options: Inertia disk and pendulum attachment included
| Interface | USB |
| Dimensions (W x H x D) | 10.2 cm x 10.2 cm x 11.7 cm |
| Weight | 1.083 kg |
| Pendulum length (pivot to tip) | 9.5 cm |
| DC motor encoder resolution (quadrature mode) | 2,048 counts/revolution |
| Pendulum module encoder resolution (quadrature mode) | 2,048 counts/revolution |
| DC motor nominal voltage | 24 V |
| DC motor nominal current (no load) | 0.016 A |
| DC motor nominal speed (no load) | 5400 RPM |
| Current sense | 12-bit, with 16 sample PWM synchronized digital filtering |
| Encoder | 2 x 24-bit |
| Digital tachometer | 2 x 32-bit with 13.8ns resolution |
Textbook Mapping
Click here to view our comprehensive mapping tool which allows you to align courseware sections with specific chapters of the Experience Controls textbook app, as well as the most popular engineering textbooks such as:
Control Systems Engineering – N.S. Wise
Feedback Systems – K.J. Astrom & R.M. Murray
Feedback Control of Dynamic Systems – G.F. Franklin, J.D. Powell & A. Emami-Naeini
Modern Control Systems – R.C. Dorf & R.H. Bishop
Modern Control Engineering – K. Ogata
Automatic Control Systems – F. Golnaraghi & B.C. Kuo
Control Systems Engineering – I.J. Nagrath & M. Gopal
Mechatronics – W. Bolton
| Data acquisition device | Integrated |
| Amplifier | Integrated |
| Control design environment | QUARC™ for MATLAB Simulink |
| Quanser API’s for Python and C/C++ |














