
ชุดศึกษาหุ่นยนต์เคลื่อนที่ทางอากาศ รุ่น Qdrone
ข้อมูลผลิตภัณฑ์
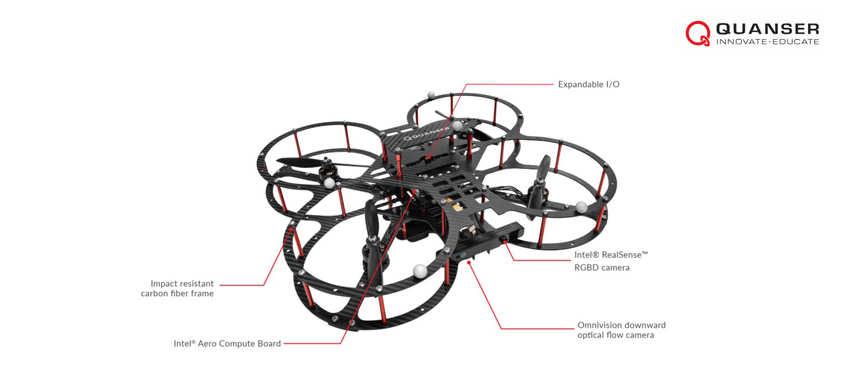
Quanser QDrone เป็นโดรน quadrotor ระบบอัตโนมัติขนาดกลางที่มาพร้อมกับบอร์ดประมาณผล Intel® Aero, กล้องความละเอียดสูงและระบบการสื่อสารไร้สาย (WiFi) ด้วยระบบสถาปัตยกรรมแบบเปิด (open-architecture) และการออกแบบโดรนเพื่อมุ่งเน้นสำหรับงานวิจัย ทำให้ QDrone เหมาะสำหรับช่วยในการคิดค้นงานวิจัยเชิงนวัตกรรมในกลุ่มเช่น multi-agent, swarm และ vision-based applications.
QDrone มีโครงสร้างที่ทำด้วยคาร์บอนไฟเบอร์ที่ทนต่อแรงกระแทกทำให้มีความคล่องแคล่ว สามารถทนต่อแอพพลิเคชั่นที่มีแรงกระแทกสูง และใช้เวลาในการซ่อมแซมน้อย
ซึ่ง Research Studio จากทาง Quanser มาพร้อมกับ Qdrone และ ยานยนต์ภาคพื้นดิน Qbot ทำการควบคุมด้วย ground control station , อุปกรณ์สำหรับการมองเห็นและอุปกรณ์ด้านความปลอดภัย
คุณสมบัติของ Qdrone
– โครงสร้างโดรนทำด้วย คาร์บอน – ไฟเบอร์ น้ำหนักเบา
– ทำงานด้วยบอร์ดประมวลผล Intel® Aero (Quad-core Intel Atom® processor)
Quad-core 64-bit 2.56 Ghz Processor
4 GB LPDDR3-1600 RAM
– ขนาดโดรน 40x40x15 เซนติเมตร
– น้ำหนักประมาณ 1000 กรัม
– น้ำหนักบรรทุกสูงสุดประมาณ 300 กรัม
– จ่ายไฟด้วยแบตเตอรรี่ 3S 11.1V LiPo (3300mAh) with XT60 connector
– ระยะเวลาการบินประมาณ 11 นาทีต่อการชาจแบตเตอรรี่หนึ่งรอบ
อินพุต/เอาท์พุต
• PWM (8x)
• UART (2x)
• SPI (3x SS pins)
• I2C
• ADC (4x)
• Encoder Input (3x)
• CPU GPI0 (5x)
– กล้อง Intel® RealSense™ (R200) RGBD Depth sensing ระยะวัดความลึก (3-4 เมตร)
ความละเอียด 640×480 ที่ 60 FPS หรือ 1080p ที่ 30 FPS
– กล้อง optical flow Omnivision OV7251 ความละเอียด 640×480 ที่ 120 Fps
เนื้อหาสามารถใช้ทำการทดลอง
– Advanced flight control
• Fault tolerance
• Dynamic docking
• Landing on moving vehicles
• Non-vertical takeoff/landing
– Swarm intelligence – Machine vision – Collision avoidance – SLAM and autonomy – Surveillance and mapping
– Machine learning and AI- Payload balance and transfer – Multivehicle collaboration – Mass data collection – Sensory network
– Sensor fusion – Search and rescue – Heterogeneous swarm














