Autonomous Vehicles Research Studio
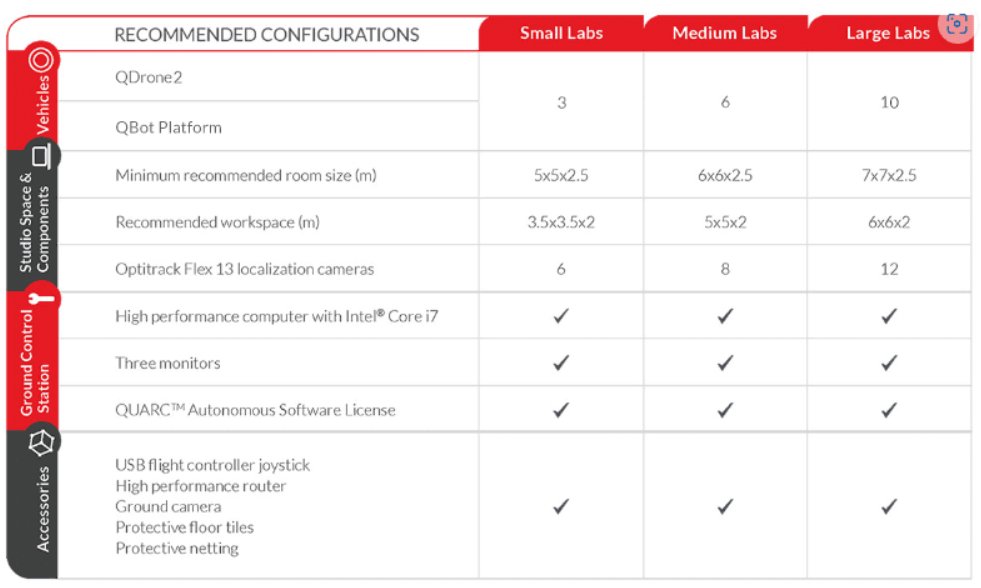
Quanser’s new Autonomous Vehicles Research Studio is the ideal solution for academics looking to build an indoor multi-vehicle research lab in a short amount of time. Consisting of QDrone quadrotors and QBot Platform ground vehicles, ground control station, vision, and safety equipment, the Autonomous Vehicles Research Studio is the only option for research groups looking to jumpstart autonomous robotics research programs and be productive in a very short amount of time.
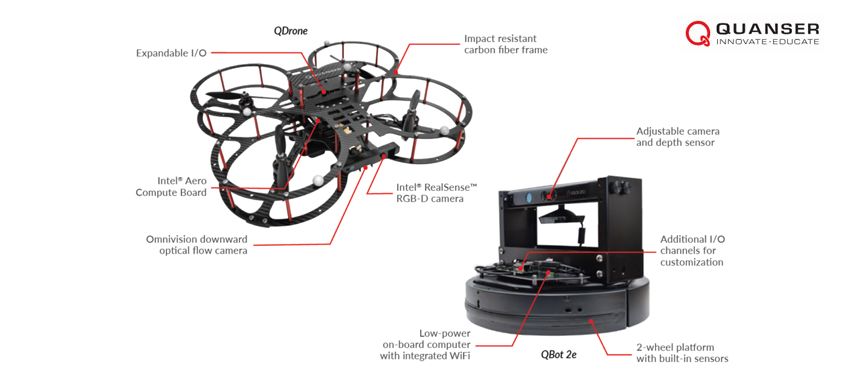
At the center of the research studio are two autonomous vehicles for air and ground: the QDrone 2 and QBot Platform. The successor of the QBall 2, the QDrone 2 is a quadrotor air vehicle equipped with powerful on-board NVIDIA Jetson Xavier NX SOM, multiple high-resolution cameras and integrated sensors. On the ground, the QBot Platform is an innovative open-architecture autonomous ground robot, equipped with a wide range of built-in sensors and a vision system. Working individually or in a swarm, these are the ideal vehicles for your research applications.